HOW MANY DARK FRAMES SHOULD I USE?
I've seen this question asked many times, and, the answers are always somewhat vague. No wonder, because, the answer depends on several factors that vary from user to user such as; Amount of Sky Glow (LP), Length of exposure, Camera Dark Current, etc.
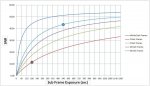
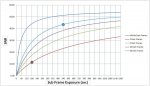
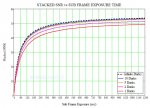
I've created an Excel worksheet that takes all of the various factors into account, and, presents a graph showing the final stacked SNR for 2, 5, 10, 20, and infinite Dark Frames. See first picture below.
The vertical axis of the graph is the relative SNR for the stacked images from a nights data collection. The horizontal axis is Sub Frame Integration Time (in other words, how long is your exposure for each image). The actual SNR isn't important. What is important is if your choice of Sub Frame Integration Time and # of Dark Frames is maximizing your SNR.
In the picture below there are two dots on the graph. [list type=decimal]
[*]The red dot indicates that collecting the data using a Sub Frame Exposure Time of 180 sec, and, processing the data with only 2 Dark Frames would yield a SNR of about 11.
[*]If 20 Dark Frames had been used to process the same 180 sec Sub Frames data the light-blue trace shows the SNR would have improved to about 29, a significant improvement.
[*]If the data were collected using 540 sec Exposures (rather than 180 sec Exposures) and 20 Dark Frames were used to process the data (the conditions for the blue dot) the SNR would be about 43.
[/list]
Again, the absolute value of the SNR is not important. What is important is to understand that a higher SNR on the graph means a better final image (lower noise). For example, this allows you to determine whether or not you need to collect more Dark Frames.
The graph in the first image is for my camera/telescope and LP/filter conditions. Your graph will be determined by your camera/telescope/LP etc.
The worksheet (see second image) requires data from 2 Bias Frames, 2 Dark Frames and 2 Light Frames (Light frames MUST be registered to each other) all taken at the same ISO setting on the camera (I used ISO 800 for my Canon T3). The Light and Dark frames need to have the same Exposure Time (I used 180 sec for my data).
Each pair of RAW frames were loaded into Pixinsight and subtracted using PixelMath to create a Difference image. The Statistics process was then used to measure the stdDev of the Difference image with the units in the upper left corner of the Statistics window set to 14-bit to match my camera RAW output. You would change this to match your camera output. The result of doing this for all three sets of images will be: StdDev(Bias1-Bias2), StdDev(Dark1-Dark2) and StdDev(Light1-Light2). These values are entered into the Excel worksheet.
In addition you need to enter:
Total time to collect data = the length of time you expect to be collecting data [time from the start of the first image till the end of the last image] (min).
t = the exposure time for the Dark and Light frames used to measure the StdDev.
Dither and Download time = the average time between the end of one image and the start of the next. Because of dithering and settling time there are about 60 seconds between my images.
If anyone is interested in the Excel worksheet just contact me with a PM and I'll be glad to send it to you.
Comments welcome.
Steve
I've seen this question asked many times, and, the answers are always somewhat vague. No wonder, because, the answer depends on several factors that vary from user to user such as; Amount of Sky Glow (LP), Length of exposure, Camera Dark Current, etc.
I've created an Excel worksheet that takes all of the various factors into account, and, presents a graph showing the final stacked SNR for 2, 5, 10, 20, and infinite Dark Frames. See first picture below.
The vertical axis of the graph is the relative SNR for the stacked images from a nights data collection. The horizontal axis is Sub Frame Integration Time (in other words, how long is your exposure for each image). The actual SNR isn't important. What is important is if your choice of Sub Frame Integration Time and # of Dark Frames is maximizing your SNR.
In the picture below there are two dots on the graph. [list type=decimal]
[*]The red dot indicates that collecting the data using a Sub Frame Exposure Time of 180 sec, and, processing the data with only 2 Dark Frames would yield a SNR of about 11.
[*]If 20 Dark Frames had been used to process the same 180 sec Sub Frames data the light-blue trace shows the SNR would have improved to about 29, a significant improvement.
[*]If the data were collected using 540 sec Exposures (rather than 180 sec Exposures) and 20 Dark Frames were used to process the data (the conditions for the blue dot) the SNR would be about 43.
[/list]
Again, the absolute value of the SNR is not important. What is important is to understand that a higher SNR on the graph means a better final image (lower noise). For example, this allows you to determine whether or not you need to collect more Dark Frames.
The graph in the first image is for my camera/telescope and LP/filter conditions. Your graph will be determined by your camera/telescope/LP etc.
The worksheet (see second image) requires data from 2 Bias Frames, 2 Dark Frames and 2 Light Frames (Light frames MUST be registered to each other) all taken at the same ISO setting on the camera (I used ISO 800 for my Canon T3). The Light and Dark frames need to have the same Exposure Time (I used 180 sec for my data).
Each pair of RAW frames were loaded into Pixinsight and subtracted using PixelMath to create a Difference image. The Statistics process was then used to measure the stdDev of the Difference image with the units in the upper left corner of the Statistics window set to 14-bit to match my camera RAW output. You would change this to match your camera output. The result of doing this for all three sets of images will be: StdDev(Bias1-Bias2), StdDev(Dark1-Dark2) and StdDev(Light1-Light2). These values are entered into the Excel worksheet.
In addition you need to enter:
Total time to collect data = the length of time you expect to be collecting data [time from the start of the first image till the end of the last image] (min).
t = the exposure time for the Dark and Light frames used to measure the StdDev.
Dither and Download time = the average time between the end of one image and the start of the next. Because of dithering and settling time there are about 60 seconds between my images.
If anyone is interested in the Excel worksheet just contact me with a PM and I'll be glad to send it to you.
Comments welcome.
Steve